


Robust Single-View Geometry And Motion Reconstruction

ROBUST SINGLE-VIEW GEOMETRY AND MOTION RECONSTRUCTION
Hao Li, Bart Adams, Leonidas J. Guibas, Mark Pauly
ACM Transactions on Graphics, Proceedings of the 2nd ACM SIGGRAPH Conference and Exhibition in Asia 2009, 12/2009 – SIGGRAPH ASIA ’09
[paper] [video] [bonus] [fast forward] [bibtex]
Copyright © 2014 Hao Li

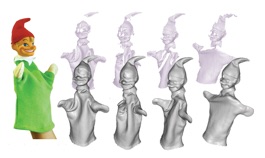
We present a framework and algorithms for robust geometry and motion reconstruction of complex deforming shapes. Our method makes use of a smooth template that provides a crude approximation of the scanned object and serves as a geometric and topological prior for reconstruction. Large-scale motion of the acquired object is recovered using a novel space-time adaptive, non-rigid registration method. Fine-scale details such as wrinkles and folds are synthesized with an efficient linear mesh deformation algorithm. Subsequent spatial and temporal filtering of detail coefficients allows transfer of persistent geometric detail to regions not observed by the scanner. We show how this two-scale process allows faithful recovery of small-scale shape and motion features leading to a high-quality reconstruction. We illustrate the robustness and generality of our algorithm on a variety of examples composed of different materials and exhibiting a large range of dynamic deformations.
PAPER VIDEO
BONUS FEATURE: MULTI-VIEW RECONSTRUCTION
SIGGRAPH ASIA 2009 FAST FORWARD
TALK SLIDES